End-to-End Trained AI Model
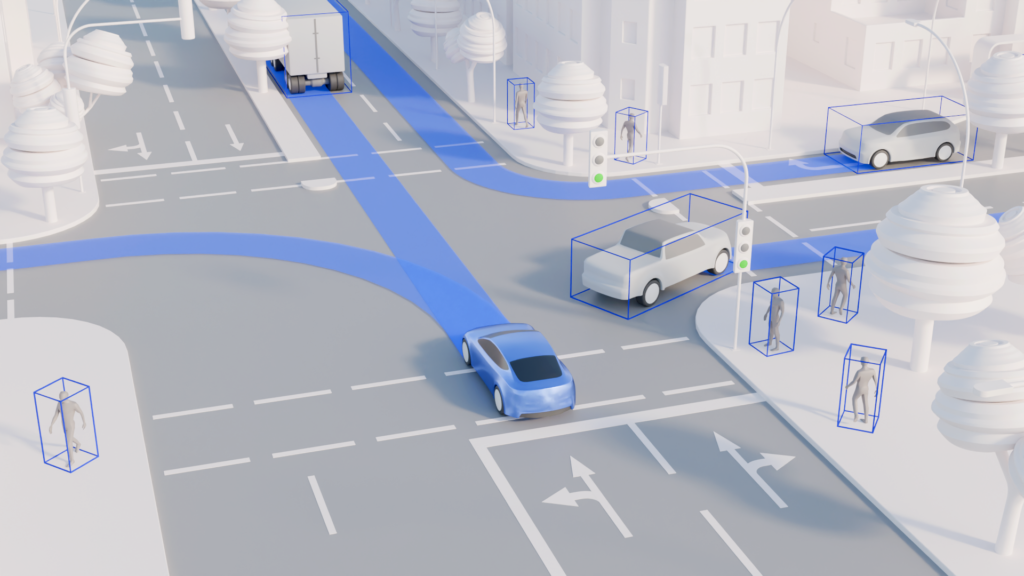
Our perception detects and tracks all traffic participants. Additionally, we predict their future behavior to safely navigate complex scenarios.

Our system understands the road layout and road topology without additional map data. This enables scalable driving even in unseen environments.
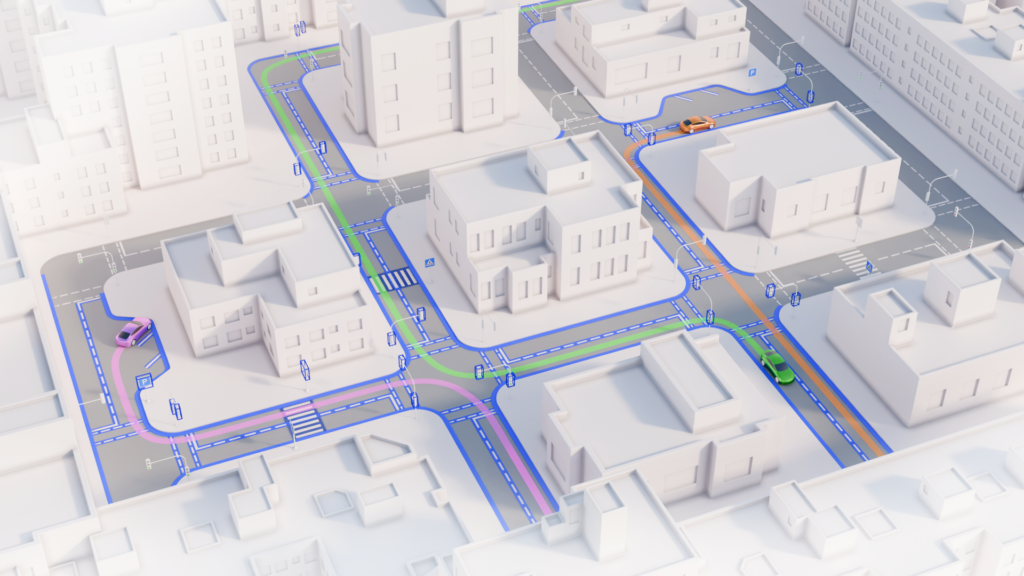
Designed for the Fleet
The SafeAD Fleet Mapping Solution generates highly automated large-scale maps from low fidelity fleet data. This allows to increase the sensing and planning range to improve comfort and reliability.
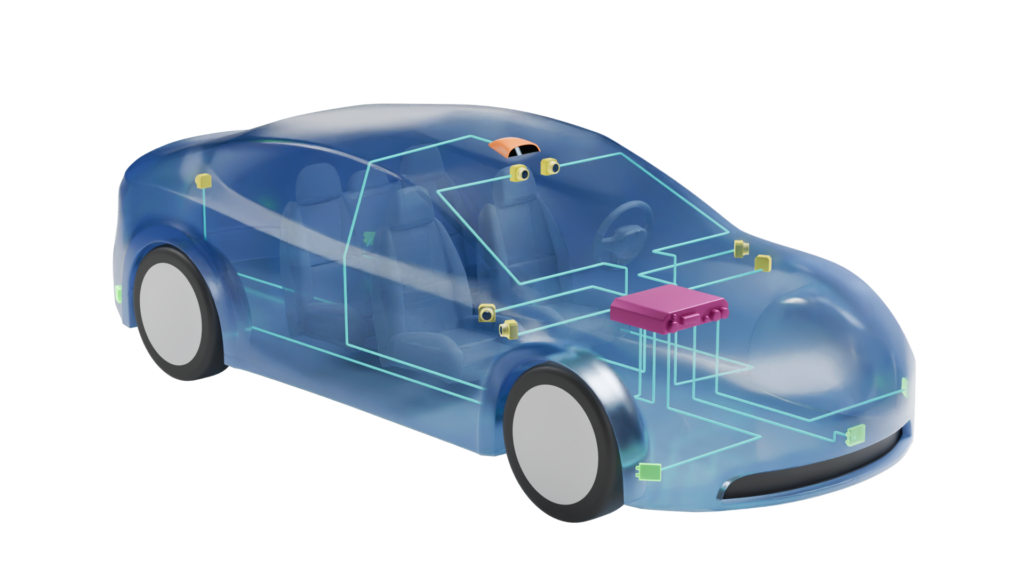
Flexible Architecture
The SafeAD Perception model enables flexible sensor configurations. Ranging from camera-only for L2+ use cases to camera-radar-lidar setups for L4 driving.